
A mining collision prevention system is an advanced safety technology that detects, predicts, and prevents collisions between vehicles, equipment, and personnel in mining environments. It uses technologies such as radar, GPS, AI cameras, LiDAR, and RF tracking to monitor real-time risk. Advanced Level 9 systems can actively intervene by slowing or stopping machinery when a collision is imminent, reducing reliance on human reaction time.
Mining remains one of the world’s most demanding industries. Massive haul trucks, loaders, excavators, dozers, underground machinery, light vehicles, and workers frequently operate within complex environments where visibility is limited and reaction time is critical. Despite improvements in training, procedures, and operational controls, vehicle interactions continue to represent one of the highest-risk areas within mining operations globally. Vehicle interaction failures continue to account for a significant proportion of mining-related fatalities and serious incidents.
Modern mining operations can no longer rely solely on mirrors, warning signs, operator awareness, or traditional safety procedures. Human reaction time has limitations, and hazardous situations often develop within milliseconds.
Mining collision prevention systems were developed specifically to address this challenge.
These intelligent systems use multiple technologies including:
- Radar
- GPS positioning
- Ultra-Wideband tracking
- RFID systems
- AI vision systems
- Cameras
- LiDAR
- Real-time machine communication
- Automated intervention controls
By continuously monitoring the surrounding environment, these systems detect hazards, calculate risk, predict collision trajectories, and when required, intervene before a dangerous interaction occurs.
Advanced Level 9 systems go beyond warning operators and can actively reduce machine speed or apply emergency braking when an imminent collision risk is detected. Automated intervention increasingly forms the final safety layer within modern mining operations.
As the mining industry moves toward zero-harm objectives, digital mines, autonomous fleets, and stronger safety requirements, collision prevention systems are becoming foundational technologies rather than optional enhancements.

What Is a Mining Collision Prevention System?
A mining collision prevention system is an intelligent safety platform designed to continuously monitor operational environments and prevent dangerous interactions before they occur.
Unlike traditional safety systems that rely on operator awareness, modern collision prevention systems actively calculate risk in real time and apply escalating responses depending on threat severity.
These systems operate across three critical layers:
1. Detection Layer
Captures environmental and positional data using:
- Radar sensors
- GPS and GNSS tracking
- Ultra-Wideband (UWB) systems
- RF identification tags
- AI-enabled cameras
- LiDAR scanning
2. Processing Layer
Interprets live data to determine risk:
- Predicts movement paths
- Calculates collision probability
- Detects unsafe proximity zones
- Classifies objects (vehicle, pedestrian, obstacle)
3. Action Layer
Triggers safety responses:
- Visual warnings
- Audible alarms
- Haptic feedback
- Speed limitation
- Engine derating
- Automatic braking (Level 9 intervention)
This layered approach transforms mining safety from reactive to predictive.
Why Mining Collisions Continue to Occur
Mining environments create a unique combination of conditions that increase collision risk compared with many other industries.
While operators are highly trained and mines enforce strict procedures, multiple environmental and operational factors create situations where even experienced personnel can struggle.
Blind Spots
Large mining equipment creates significant blind areas around machinery.
Haul trucks, loaders, and underground machines may have visibility limitations extending several meters beyond the machine perimeter. Workers or smaller vehicles entering these zones can become invisible to operators.
In surface operations, the problem becomes even more severe when machinery increases in size.
A 300-ton haul truck moving through a production area may create visibility limitations that prevent operators from seeing personnel, support vehicles, or approaching hazards until it is too late.
Dust and Environmental Conditions
Surface mining environments frequently experience:
- Dust clouds
- Fog
- Rain
- Low light
- Harsh sunlight
- Changing terrain
These conditions significantly reduce visibility and make traditional visual safety methods less effective.
Camera-only systems can also become affected by glare or environmental contamination, which is why modern systems increasingly rely on sensor fusion technologies combining multiple detection methods.
Underground Visibility Constraints
Underground operations introduce different challenges.
These include:
- Zero natural light
- Narrow tunnels
- Tight intersections
- Sharp corners
- No GPS availability
- Confined operating spaces
Operators may only see a few meters ahead while navigating machinery through complex layouts.
Because of these conditions, underground environments often rely on technologies such as:
- Ultra-Wideband systems
- Magnetic positioning
- RF tracking
- Non-line-of-sight detection systems
Fatigue and Human Limitations
Even highly experienced operators can experience:
- Fatigue
- Distraction
- Reduced concentration
- Delayed reaction times
A hazardous interaction can develop within fractions of a second.
Human reaction alone is often insufficient during rapidly developing incidents.
This limitation is one of the primary reasons modern systems have evolved beyond awareness and warnings toward intervention-based approaches.
High-Speed Vehicle Interactions
Surface operations frequently involve:
- Long haul roads
- High vehicle speeds
- Intersections
- Multiple vehicle types
- Mixed fleet operations
As speed increases, stopping distances increase dramatically.
A vehicle moving at production speeds requires significantly greater distance to stop safely than most operators estimate.
What Is a Mining Collision Prevention System?
A mining collision prevention system is an intelligent safety platform designed to continuously monitor equipment, personnel, and environmental hazards in real time and prevent unsafe interactions before they result in an incident.
Modern systems generally consist of three layers:
Detection Layer
The first layer continuously gathers information.
Detection technologies may include:
Radar
Radar performs effectively in difficult weather and environmental conditions and continuously tracks object distance and speed.
GPS and GNSS
Surface mines frequently use satellite positioning technologies for vehicle location tracking.
Ultra-Wideband Systems
Underground operations often use UWB technology because traditional GPS signals cannot penetrate underground environments.
RF Tags
Workers and equipment may carry identification tags allowing accurate positioning.
AI Cameras
Modern cameras use image recognition to identify:
- Personnel
- Vehicles
- Obstacles
- Lane boundaries
- Unsafe movement patterns
LiDAR
Laser scanning technology builds detailed three-dimensional environmental maps.
Intelligence Layer
Raw sensor data alone does not prevent collisions.
The system must process information and determine whether risk exists.
This includes:
- Dynamic zoning
- Path prediction
- Relative speed calculations
- Risk scoring
- Object classification
- Behaviour analysis
Modern systems continuously evaluate whether equipment paths may intersect.
Intervention Layer
Once risk reaches a predefined threshold, action occurs.
Possible actions include:
- Audible warnings
- Dashboard alerts
- Seat vibration
- Speed reduction
- Engine derating
- Automatic braking
- Emergency stopping
Level 9 systems move beyond operator awareness and actively intervene when operators cannot respond quickly enough.
Collision Prevention vs Collision Avoidance vs Proximity Detection
These terms are frequently used interchangeably, but they are not identical.
| Technology | Primary Function | Intervention Capability | Typical Application |
|---|---|---|---|
| Proximity Detection System (PDS) | Detect nearby objects | None | Worker and vehicle awareness |
| Collision Avoidance System (CAS) | Warn operators of danger | Limited | Audible and visual alerts |
| Collision Prevention System (CPS) | Prevent impact entirely | Full intervention | Automatic braking and machine control |
Understanding these differences is critical because many systems marketed as collision prevention solutions only provide awareness or alerts.
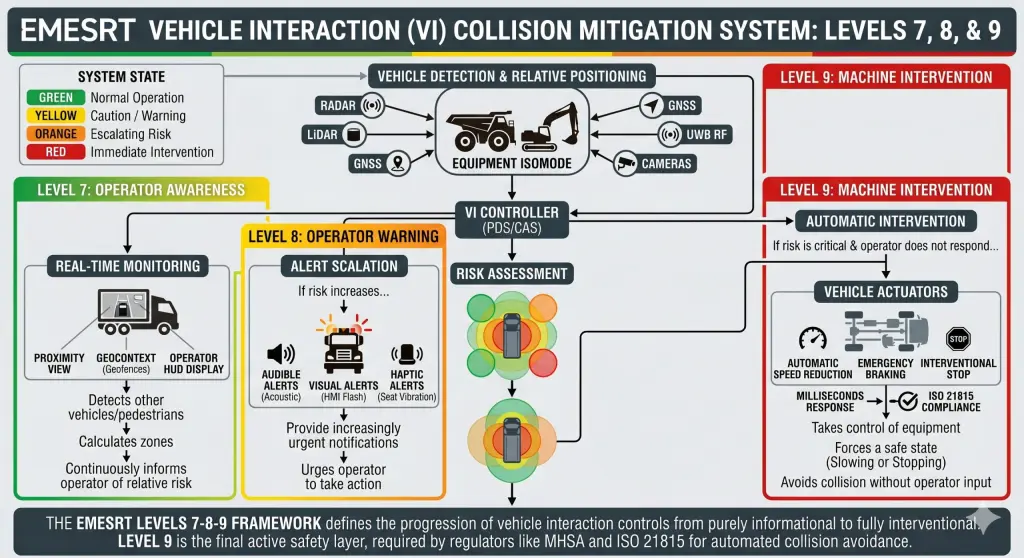
Understanding EMESRT Levels
The Earth Moving Equipment Safety Round Table developed a framework that defines levels of safety controls for mining operations. These levels progressively move from operational controls toward automated intervention.
| Level | Function | Primary Action |
|---|---|---|
| Levels 1–6 | Administrative and operational controls | Prevention planning |
| Level 7 | Operator awareness | Visual information |
| Level 8 | Advisory controls | Active warnings |
| Level 9 | Intervention controls | Automated action |
Level 9 represents the highest level of protection because the system actively intervenes rather than depending entirely on operator response.
Automatic intervention can include:
- Speed reduction
- Propulsion control
- Retarder activation
- Emergency braking
Response times occur within milliseconds, which is often faster than human reaction capability.
Surface Mining vs Underground Mining Collision Prevention Systems
Mining environments are not identical. Surface and underground operations create entirely different operational challenges, which means collision prevention systems cannot use a one-size-fits-all approach.
The effectiveness of any system depends on selecting technologies designed specifically for the operating environment.
| Feature | Surface Mining | Underground Mining |
|---|---|---|
| Primary Challenges | Dust, speed, large blind spots | Tight spaces, no GPS, limited visibility |
| Vehicle Speeds | Higher speeds | Lower speeds |
| Positioning Technology | GPS/GNSS | UWB, RF, magnetic tracking |
| Environmental Conditions | Rain, sunlight, terrain changes | Confined spaces and darkness |
| Detection Requirements | Long-range detection | Short-range precision detection |
| Common Equipment | Haul trucks, dozers, excavators | LHDs, drill rigs, utility vehicles |
The key difference is simple:
- CAS warns
- CPS prevents
Understanding EMESRT Levels (7, 8, 9)
The EMESRT framework defines increasing levels of safety control in mining.
| Level | Description | Function |
|---|---|---|
| Level 7 | Awareness | Alerts operator of risk |
| Level 8 | Advisory | Suggests corrective action |
| Level 9 | Intervention | Automatically controls machine |
Level 7 – Awareness
Provides alerts such as:
- Beeping alarms
- Visual warnings
- Display indicators
Level 8 – Advisory Control
Provides guidance:
- Suggested braking
- Steering correction
- Speed reduction prompts
Level 9 – Intervention Control
Takes direct control of machinery:
- Automatic braking
- Engine torque reduction
- Machine override control
Level 9 is considered the highest safety standard because it removes dependency on human reaction.
Surface Mining Collision Prevention
Surface operations present several unique hazards.
Large haul roads frequently include:
- High-speed traffic
- Multiple vehicle types
- Intersections
- Changing terrain
- Large blind spots
- Variable weather conditions
A collision between heavy machinery and light vehicles can create severe consequences due to machine size and speed.
Surface systems commonly rely on:
GPS and GNSS
Satellite positioning provides precise location tracking for vehicles across large operational areas.
Modern systems may use Real-Time Kinematic (RTK) corrections for improved accuracy.
Radar Technology
Radar performs reliably in:
- Dust
- Rain
- Fog
- Low visibility conditions
Unlike cameras alone, radar continues functioning in harsh operating conditions.
AI Vision Systems
Modern camera systems increasingly use artificial intelligence to:
- Identify pedestrians
- Classify vehicles
- Detect unusual movement
- Predict interaction risks
Rather than simply recording images, intelligent systems actively evaluate risk in real time.
Underground Mining Collision Prevention

Underground mining creates entirely different challenges.
Traditional GPS signals cannot penetrate underground environments.
Additional factors include:
- Zero natural light
- Tight tunnels
- Blind intersections
- Restricted maneuverability
- Multiple operating zones
Because of these limitations, underground systems often rely on alternative positioning technologies.
Ultra-Wideband (UWB)
UWB provides highly accurate indoor positioning capabilities.
Benefits include:
- Low latency
- High precision
- Reliable worker tracking
- Equipment positioning
RF Tag Systems
Workers may carry wearable tags that communicate with nearby equipment.
The system continuously calculates proximity and risk levels.
Dynamic Zone Control
Rather than maintaining fixed detection areas, modern systems increasingly use dynamic zones.
Detection zones adjust according to:
- Machine speed
- Machine type
- Direction of travel
- Operational mode
This significantly reduces nuisance alarms.
Why Level 9 Systems Are Becoming the New Mining Standard

Historically, many mining operations relied heavily on:
- Training
- Administrative procedures
- Signage
- Awareness campaigns
- Audible warnings
While these measures remain important, they depend heavily on human performance.
Human beings naturally have limitations.
Factors including:
- Fatigue
- Stress
- Reduced concentration
- Environmental distractions
- Delayed reaction times
can all contribute to incidents.
As a result, the industry has increasingly shifted toward intervention-based safety systems.
Level 9 systems provide a final protective layer when human response may not occur quickly enough.
Rather than asking:
“Did the operator see the risk?”
the question becomes:
“Can the system prevent the incident before impact occurs?”
Intervention Rather Than Awareness
Level 7 systems primarily provide awareness.
Level 8 systems guide decision-making.
Level 9 systems physically intervene.
Possible intervention actions include:
- Engine power reduction
- Speed limiting
- Retarder activation
- Brake application
- Emergency stopping
This progression represents a major shift in mining safety philosophy.
Faster Than Human Reaction Time
Average human reaction time varies depending on conditions.
An operator may require time to:
- Identify the hazard
- Process information
- Decide on action
- Apply braking
During that period, vehicles may travel several meters.
Automated systems process sensor data continuously and can initiate intervention significantly faster.
Supporting Zero-Harm Objectives
Mining organizations increasingly adopt zero-harm strategies.
Zero harm focuses on eliminating serious incidents and fatalities through:
- Engineering controls
- Technology integration
- Risk management systems
- Predictive safety solutions
Collision prevention technologies align directly with these objectives.
Integrating Collision Prevention Into Legacy Mining Fleets
A common misconception is that advanced collision prevention systems only work with new equipment.
Many operations continue running mixed fleets consisting of:
- New intelligent equipment
- Older machines
- Multiple OEM manufacturers
- Specialized equipment
Replacing entire fleets is often financially unrealistic.
Modern systems increasingly support retrofitting existing machinery.
Benefits of Retrofitting Existing Equipment
Retrofitting can provide:
- Lower implementation costs
- Faster deployment
- Reduced capital expenditure
- Improved safety across mixed fleets
- Extended equipment life cycles
Rather than replacing vehicles entirely, mines can upgrade safety functionality.
Mixed Fleet Challenges
Mixed fleets create additional complexity.
Examples include:
- Different machine protocols
- Different control architectures
- Varying communication standards
- Multiple software platforms
Successful implementation requires systems capable of integrating across diverse environments.
How is this possible? Consider the Mine Safe MI Machine Controller Interface.
How Mine Safe Global Supports Modern Mining Safety
Mining operations require practical safety solutions that function within real-world environments.
Technology alone is not enough.
Systems must integrate effectively into existing operations while maintaining productivity and minimizing disruption.
Mine Safe Global supports mining operations through solutions designed for:
- Surface mining
- Underground mining
- Mixed fleets
- Legacy equipment
- OEM integration
- Level 9 intervention capability
- Site-specific configurations
Rather than relying on generic deployments, systems can be configured according to operational requirements.
These configurations may include:
- Dynamic safety zones
- Vehicle classification
- Operational modes
- Traffic patterns
- Site risk profiles
Real-Time Visibility
Modern safety platforms increasingly provide centralized visibility through:
- Dashboards
- Analytics platforms
- Event reporting
- Risk monitoring
- Historical trend analysis
This allows operations to identify patterns before incidents occur.
Examples include:
- Frequent near misses
- High-risk intersections
- Operator behaviour trends
- Congestion zones
The result is proactive safety management rather than reactive incident investigation.
Benefits of Mining Collision Prevention Systems
Implementing collision prevention technologies extends beyond regulatory requirements.
Benefits often include:
Reduced Incidents
Early hazard detection reduces exposure to dangerous interactions.
Improved Worker Safety
Workers gain additional protection in environments where visibility may be limited.
Reduced Equipment Damage
Collisions involving heavy equipment can create substantial repair costs.
Prevention reduces:
- Equipment downtime
- Replacement costs
- Repair expenses
Improved Productivity
Unexpected incidents frequently interrupt production.
Reducing incidents supports:
- Operational continuity
- Fleet availability
- Production targets
Better Safety Culture
Visible safety technologies reinforce operational commitment to worker protection.
Frequently Asked Questions
What is a mining collision prevention system?
A mining collision prevention system is an intelligent safety solution designed to detect hazards, predict dangerous interactions, and prevent vehicle-to-vehicle or vehicle-to-pedestrian incidents before they occur.
What is the difference between collision avoidance and collision prevention?
Collision avoidance systems primarily provide warnings and guidance to operators.
Collision prevention systems extend beyond alerts and actively intervene to stop or reduce collision risk.
What is a Level 9 collision prevention system?
A Level 9 system provides intervention control through actions such as:
- Automatic braking
- Speed reduction
- Machine control
These systems intervene when operators cannot react in time.
Can older mining fleets be upgraded?
Yes.
Modern systems can often be retrofitted to older equipment, allowing existing fleets to achieve advanced safety functionality.
Can mining collision systems detect pedestrians?
Yes.
Modern systems can detect pedestrians using combinations of:
- AI cameras
- RF tags
- Radar
- UWB technology
- Proximity sensors
Can collision systems work underground?
Yes.
Underground systems frequently use:
- Ultra-Wideband tracking
- Magnetic positioning
- RF technologies
- Dynamic zone control
These technologies compensate for environments where GPS cannot operate.
How much can collision prevention systems reduce risk?
Actual reductions vary according to deployment quality and operational conditions.
Properly implemented systems can substantially reduce collision exposure and significantly improve operational safety outcomes.
The Future of Mining Collision Prevention Technology
Mining technology continues evolving rapidly.
Emerging developments include:
- Autonomous equipment
- Predictive analytics
- AI-driven risk assessment
- Connected fleets
- Digital twins
- Advanced sensor fusion
- Machine learning
Future systems may increasingly predict dangerous behaviour before risk becomes visible to operators.
Rather than simply responding to events, intelligent systems may continuously anticipate and prevent them.
Conclusion
Mining operations continue becoming more technologically advanced, connected, and automated.
At the same time, safety expectations continue increasing.
Traditional methods such as mirrors, training, and operator awareness remain important but cannot eliminate all risks.
Modern collision prevention systems provide additional layers of protection by continuously monitoring environments, identifying hazards, calculating risk, and intervening before incidents occur.
As mines move toward zero-harm objectives and increasingly adopt intelligent technologies, Level 9 intervention systems are becoming foundational safety components across both surface and underground operations.
The future of mining safety is no longer based solely on reacting after danger appears.
The future lies in preventing danger before impact ever occurs.
Improve Mining Safety With Level 9 Technology
Mine Safe Global provides advanced collision prevention systems designed for surface and underground mining operations, including legacy fleet integration and full Level 9 intervention capability.
Request a Consultation or System Demo
Written by: Mine Safe Global Engineering Team
Reviewed by: Mining Safety Specialists
Industry Focus: Surface Mining | Underground Mining | OEM Integration | Safety Systems
Last Updated: May 2026
